PT1-Term

This function block implements a first-order filter using the difference equation.
Operations
The PT1-term realizes the following function:
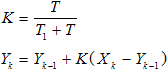
The coefficient K will be calculated only at the program start or if T1 is changed.
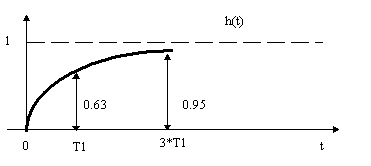
Step response:
Signals
| Name | I/O | Type(s) | Function |
|---|---|---|---|
| Xe | I | FLOAT | Input signal |
| T1 | I | FLOAT | Time constant in [s] |
| Xa | O | FLOAT | Output signal |
Comments
The function block may be used in analogue measurement filtering applications, or as part of a dynamic system simulation.