PID-Regler
PID-Regler

PID-Regler (Prozent)
")
PID-Regler (Universell)
")
Was ist ein PID-Regler?
Ein PID-Regler (aus dem Englischen: Proportional Integral Derivative Controller) ist ein Rückkopplungsmechanismus des Regelkreises, der in industriellen Steuerungssystemen genutzt wird. Ein PID-Regler berechnet ständig einen Fehlerwert, der die Differenz zwischen der gemessenen Prozessgröße und dem gewünschten Sollwert berechnet. Die Steuerung versucht den Fehler durch die Anpassung der Regelgröße, wie die Position des Regelventils, des Dämpfers oder der Stromzufuhr des Heizelements zu minimalisieren.
(Übersetzung aus Auszügen Wikipedia EN: PID controller)
Ein Beispiel zum Thema PID-Regler finden Sie in der Rubrik Beispiele und Projekte.
Reglerstrukturen (Darstellungsmöglichkeiten)
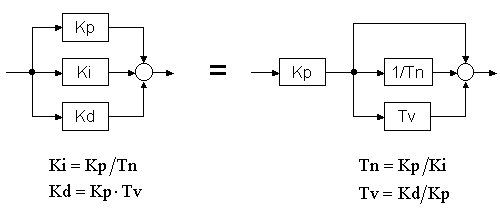
Es gibt zwei Darstellungsmöglichkeiten, die inhaltlich identisch sind. In der analogen Regeltechnik ist noch die Darstellung mit der Nachstellzeit Tn und der Vorhaltezeit Tv üblich. Die Umrechnung zwischen den beiden Strukturen ist mit den angegebenen Formeln möglich.
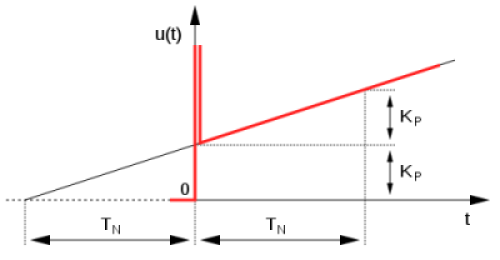
In Abb. 1 sehen Sie die ideale Sprungantwort eines PID-Reglers. Aus dem Bild wird die Bedeutung der einzelnen Parameter deutlich. Insbesondere die Bedeutung Tn als maßgeblicher Parameter für den I-Anteil ist gut zu erkennen. Hier wird auch deutlich, warum häufig Tn und nicht Ki als Parameter genutzt wird. Im realen Prozess kann man sich den Parameter Tn als Zeit allerdings besser vorstellen.
Beide Reglerstrukturen werden hier genutzt. Die Darstellung mit Tn und Tv wird häufig in Deutschland verwendet. Die Darstellung mit Ki und Kd ist im Angelsächsischen verbreitet. Es existieren drei unterschiedliche PID-Reglerimplementierungen. Im Abschnitt Sprungantwort der PID-Regler kann man das Verhalten der Regler gut vergleichen.
Was versteht man unter Nachstellzeit (Tn)?
Der I-Anteil eines Reglerausgangssignals sorgt für eine ständige Veränderung des Reglerstellgrades, bis der Istwert den Sollwert erreicht hat. Solange eine Regelabweichung besteht, wird der Stellgrad auf- bzw. abintegriert. Je länger eine Regelabweichung an einem Regler ansteht, desto größer wird der integrale Einfluss auf den Stellgrad. Je größer die Regelabweichung und je kleiner die Nachstellzeit ist, desto stärker (schneller) ist die Wirkung des I-Anteils. Der I-Anteil sorgt dafür, dass ohne bleibende Regelabweichung ausgeregelt werden kann. Die Nachstellzeit ist ein Maß dafür, wie stark die zeitliche Dauer der Regelabweichung in die Regelung eingeht. Eine große Nachstellzeit bedeutet einen geringen Einfluss des I-Anteils und umgekehrt. In der angegebenen Zeit Tn (in sec.) wird die Stellgrößenänderung, die der P-Anteil (xp oder pb) bewirkt, noch einmal aufaddiert. Somit besteht ein festes Verhältnis zwischen dem P- und I-Anteil. Wird der P-Anteil (xp) geändert, so bedeutet das auch ein geändertes Zeitverhalten bei einem gleichbleibenden Wert von Tn.
(Jumo.de: Was versteht man unter Nachstellzeit (Tn)?)
Was versteht man unter Vorhaltezeit (Tv)?
Über die Vorhaltezeit wird die Intensität des D-Anteils (Differentieller Anteil) eingestellt. Der D-Anteil eines Reglers mit PID oder PD-Struktur reagiert auf die Änderungsgeschwindigkeit des Istwertes. Beim Anfahren an den Sollwert „bremst“ der D-Anteil und kann damit ein Überschwingen der Regelgröße über den Sollwert vermeiden. Im Prinzip hat der D-Anteil folgende Auswirkungen: Sobald sich die Regelgröße verändert, wirkt der D-Anteil dieser Änderung entgegen. Für einen Regler mit einem inversen Wirksinn (also z. B. Heizen) würde dies beispielsweise bedeuten:
Verkleinert sich die Regelgröße aufgrund einer Störung in der Regelstrecke, bildet der D-Anteil einen positiven Stellgrad, welche der Verkleinerung der Regelgröße entgegen wirkt. Vergrößert sich die Regelgröße aufgrund einer Störung in der Regelstrecke, bildet der D-Anteil einen negativen Stellgrad, welche der Vergrößerung der Regelgröße entgegen wirkt. Je größer die Einstellung für die Vorhaltezeit (Wert in Sekunden) vorgenommen wird, umso größer ist das dämpfende Verhalten.
(Jumo.de: Was versteht man unter Vorhaltezeit (Tv)?)