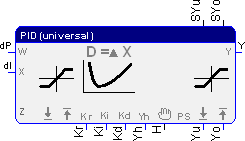
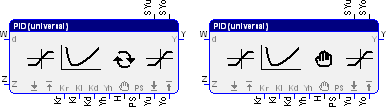
PID-Regler (Universell)
Symbol (Auswahl)
[A]
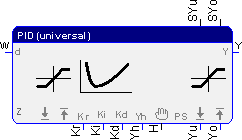
[B] Ohne Begrenzung des Stellsignals
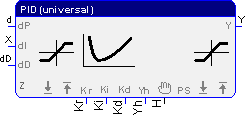
[B] Mit Störgrößenaufschaltung und Begrenzung der Eingänge
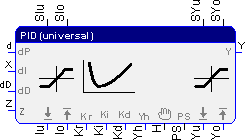
[C] Mit Störgrößenaufschaltung
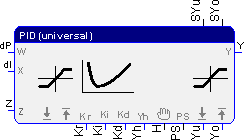
[D]
Der Funktionsbaustein PID-Regler (Universell) enthält folgende Komponenten
- proportionaler Anteil
- integraler Anteil
- differentialer Anteil
- wind-up-Verhinderung
- Stellsignalaufbereitung (mit Hand-Automatik-Umschaltung)
Der Baustein unterstützt vier Typen des PID-Reglers. Entsprechend der ausgewählten Variante stehen verschiedene Ein- und Ausgangspins zur Verfügung.
|
Typ 1 [a] |
Gemeinsame Regelabweichung für P-, I- und D-Anteil als Eingang
|
|
Typ 2 [b]
|
Getrennte Regelabweichungen für P-, I- und D-Anteil als Eingänge
|
|
Typ 3 [c]
|
Soll- und Istwert als Eingang, interne Bildung der gemeinsamen Regelabweichung für P-, I- und D-Anteil
|
|
Typ 4 [d]
|
Soll- und Istwert als Eingang, interne Bildung der gemeinsamen Regelabweichung für P- und I-Anteil; die Änderung des Istwertes (X) bildet die Regelabweichung für den D-Anteil |
Die Eingangspins sind zu beschalten. Der Eingang Störung (Z) wird auf den Ausgang vor der Stellwert-Begrenzung subtraktiv aufgeschaltet.
Die Parameter des Reglers können als Koeffizienten (Ki, Kd) oder als Zeiten (Tn, Tv) gewählt werden. Intern wird mit Koeffizienten gerechnet. Wird die Nachstellzeit Tn zu 0 so wird der I-Anteil abgeschaltet.
Werden Parameter-Pins für die Begrenzung aktiviert, so sind diese zu beschalten. Im Baustein erfolgt die jeweilige Begrenzung. Die Ausgangsbegrenzung wird zur wind-up-Verhinderung genutzt. Wird der Ausgansbereich nicht eingehalten erfolgt das Einfrieren der Integrationssumme.
Ist der Eingang Störung (Z) aktiviert so steht der Preset-Schalteingang (PS) zur Verfügung. Das Setzen bewirkt die Ausgabe des Eingangs Störung (Z) auf den Ausgang.
Das Setzen des Hand-Schalteingangs (H) führt zur Ausgabe des Handstellwertes (Yh) auf den Ausgang. Der Hand-Schalteingang ist gegenüber dem Preset-Schalteingang dominant.
Auch bei gesetztem Preset- oder Hand-Schalteingang erfolgt eine Begrenzung des Stellsignals.
Am Ausgang kann wahlweise das Stellsignal (Y) oder die Änderung des Stellsignals (dY) ausgegeben werden.
Beim Überschreiten der Begrenzungen werden die Ausgänge SYu bzw. SYo gesetzt.
Parameter
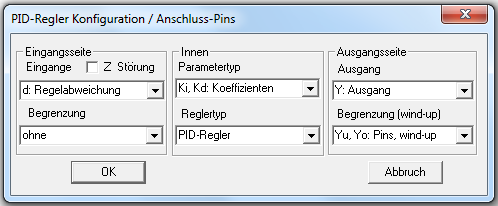
Über den Parameter-Dialog können der Typ des PID-Reglers sowie weitere Varianten ausgewählt werden. Hierbei kann entschieden werden, welche Ein- und Ausgänge verfügbar sind, ob die angeschlossenen Parameter als Zeiten oder Koeffizienten interpretiert werden sollen und welche Regelanteile überhaupt zum tragen kommen sollen (PID, PI, PD).
Operationen
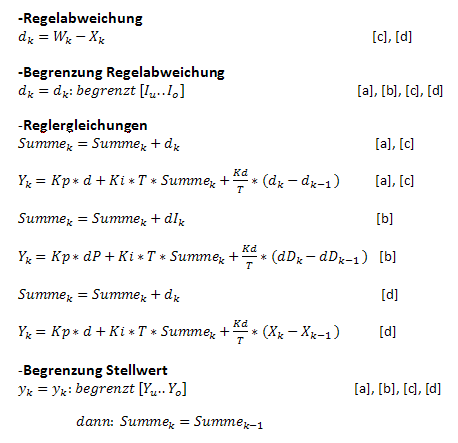
Legende:
T Zykluszeit
Signale
| Name | I/O | Typ(en) | Funktion |
|---|---|---|---|
| d | I | FLOAT | Regelabweichung [a] |
| dP | I | FLOAT | Regelabweichung; P-Anteil [b] |
| dI | I | FLOAT | Regelabweichung; I-Anteil [b] |
| dD | I | FLOAT | Regelabweichung; D-Anteil [b] |
| W | I | FLOAT | Sollwert [c], [d] |
| X | I | FLOAT | Istwert (Regelgröße) [c], [d] |
| Z | I | FLOAT | Störung (Z-Aufschaltung) |
| Iu | I | FLOAT | Untere Begrenzung der Eingänge |
| Io | I | FLOAT | Obere Begrenzung der Eingänge |
| Kr | I | FLOAT | Verstärkungsfaktor |
| Ki, Tn | I | FLOAT | Integralkoeffizient, Vorhaltezeit |
| Kd, Tv | I | FLOAT | Differenzialkoeffizient, Nachstellzeit |
| Yh | I | FLOAT | Handstellwert |
| H | I | BIT | Handbetrieb |
| PS | I | BIT | Störungsbetrieb, Preset (Z-Aufschaltung) |
| Yu | I | FLOAT | Begrenzung (unten) |
| Yo | I | FLOAT | Begrenzung (Oben) |
| SIu | O | BIT | untere Grenze (Regelabweichung W-X) erreicht |
| SIo | O | BIT | obere Grenze (Regelabweichung W-X) erreicht |
| SYu | O | BIT | untere Grenze (Stellwert) überschritten |
| SYo | O | BIT | obere Grenze (Stellwert) überschritten |
| Y | O | FLOAT | Reglerausgang |
| dY | O | FLOAT | Stellwertdifferenz – Ausgang |
Anschlussparameter
| Ki | = 0 | I-Abteil abgeschaltet |
| Tn | = 0 | I-Abteil abgeschaltet |
| Kd | = 0 | D-Anteil abgeschaltet |
| Tv | = 0 | D-Anteil abgeschaltet |
| H | = 1 | Handbetrieb - Yh wird direkt auf den Ausgang Y durchgeschaltet (dominant). |
| PS | = 1 | Das Störsignal Z wird direkt auf den Ausgang Y durchgeschaltet. |
Beispiele
Strecke: PT1-Glied (T1=4)
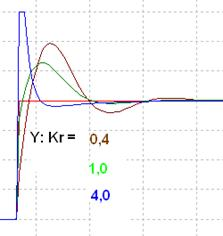
Ki=0,5 Kd=1,0
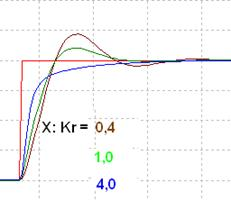
Sprungantwort, Variation der Verstärkung
Kr=0,5 Kd=1,0
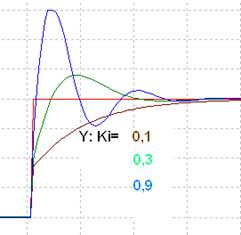
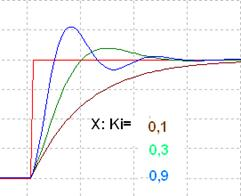
Sprungantwort, Variation des Integralkoeffizienten
Kr=0,5 Ki=0,7
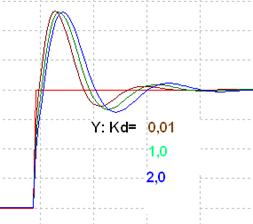
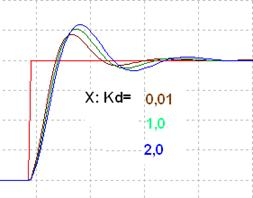
Sprungantwort, Variation des Differientialkoeffizienten
Visualisierung
Der Baustein zeigt an, ob der Regler gerade im Hand- oder Automatikbetrieb arbeitet.