PID-Regler
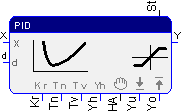
Der Funktionsbaustein PID-Regler enthält folgende Komponenten:
- proportionaler Anteil
- integraler Anteil
- differentialer Anteil
- wind-up-Verhinderung
- Stellsignalaufbereitung (mit Hand-Automatik-Umschaltung)
Der Regler bildet die folgende kontinuierliche Übertragungsfunktion nach:
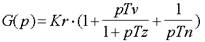
Intern wird ein Geschwindigkeitsalgorithmus realisiert. Das interne Differenzsignal wird in der Stellsignalaufbereitung aufsummiert. Dies ermöglicht eine stoßfreie Hand/Automatik-Umschaltung und eine stoßfreie Parametrierung.
Der D-Anteil des Reglers kann am Eingang X angeschlossen werden und reagiert somit nur auf die Änderungen der Regelgröße und nicht auf Sollwertänderungen.
Betriebsarten für Handbetrieb:
a) Der Regler wird mit einem Hand-Differenz-Signal betrieben
b) Das Handsignal an Yh ist ein Hand-Absolutwert und wird direkt auf den Ausgang und auf die interne Summe des Integrierers geschaltet. (siehe Generierbyte weiter unten)
Operationen
Realisierung des Reglers:
![]()
P-Anteil:
![]()
I-Anteil (Trapezregel):
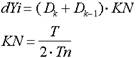
Bei einer Begrenzung des Ausgangssignals wird der I-Anteil gerichtet abgeschaltet, bis diese Begrenzung durch Vorzeichenwechsel der Regelabweichung wieder abgebaut wird.
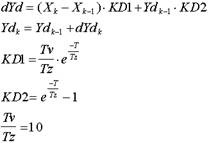
D-Anteil:
Signale
| Name | I/O | Typ(en) | Funktion |
|---|---|---|---|
| X | I | FLOAT | Eingang (Regelgröße) |
| d | I | FLOAT | Eingang (Regelabweichung) |
| Kr | I | FLOAT | Verstärkungsfaktor |
| Tn | I | FLOAT | Nachstellzeit in [s] |
| Tv | I | FLOAT | Vorhaltezeit in [s] |
| Yh | I | FLOAT | Handsignal/Handdifferenzsignal |
| HA | I | BYTE | Generier- und Schaltbyte |
| Yo | I | FLOAT | Begrenzung (oben) |
| Yu | I | FLOAT | Begrenzung (unten) |
| St | O | BYTE | Statusbyte |
| Y | O | FLOAT | Reglerausgang |
Anschlussparameter
| Tn | = 0 |
I-Abteil abgeschaltet |
| Tv | = 0 |
D-Anteil abgeschaltet |
| HA [0] |
= 1 |
Handbetrieb |
| HA [1] |
= 1 |
Y+ addiert das an Yh anliegende Handsignal mit Yi (Betriebsart a) |
| HA [2] |
= 1 |
Y- subtrahiert das an Yh anliegende Handsignal von Yi (Betriebsart a) |
| HA [3] |
= 1 |
Betriebsartenumschaltung: Bei 1-Pegel wird das Handsignal Yh direkt auf den Ausgang Y geschaltet (Betriebsart b). |
Statusbyte
| St [0] | = 1 |
Grenzwert Yu erreicht |
| St [1] | = 1 |
Grenzwert Yo erreicht |
Visualisierung
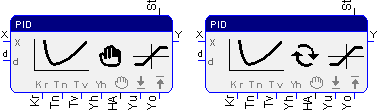
Der Baustein zeigt an, ob der Regler gerade im Hand- oder Automatikbetrieb arbeitet.