PID-Regler (Prozent)
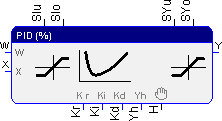
Der Funktionsbaustein PID-Regler (Prozent) enthält folgende Komponenten
- proportionaler Anteil
- integraler Anteil
- differentialer Anteil
- wind-up-Verhinderung
- Stellsignalaufbereitung (mit Hand-Automatik-Umschaltung)
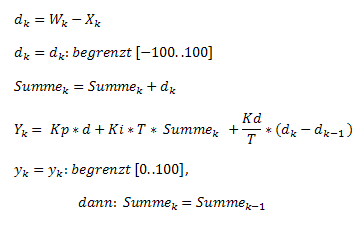
Die Regelparameter sind als Koeffizienten einzugeben.
Aus dem Soll- und Istwert (W, X) wird intern die Regelabweichung gebildet (W-X) und auf den Bereich -100 bis 100 begrenzt.
Das Stellsignal wird auf den Bereich 0 bis 100 begrenzt. Gleichzeitig wird die Integralsumme auf den letzten Wert zurückgesetzt (wind-up-Verhinderung).
Operationen
Signale
| Name | I/O | Typ(en) | Funktion |
|---|---|---|---|
| W | I | FLOAT | Sollwert |
| X | I | FLOAT | Istwert (Regelgröße) |
| Kr | I | FLOAT | Verstärkungsfaktor |
| Ki | I | FLOAT | Integralkoeffizient |
| Kd | I | FLOAT | Differenzialkoeffizient |
| Yh | I | FLOAT | Handstellwert |
| H | I | BIT | Handbetrieb |
| Slu | o | BIT | Regelabweichung begrenzt auf -100 |
| Slo | O | BIT | Regelabweichung begrenzt auf 100 |
| SYu | O | BIT | Stellwert begrenzt auf 0 |
| SYo | O | BIT | Stellwert begrenzt auf 100 |
| Y | O | FLOAT | Reglerausgang (Stellwert) |
Anschlussparameter
| Ki | = 0 | I-Abteil abgeschaltet |
| Kd | = 0 | D-Anteil abgeschaltet |
| H | = 1 | Handbetrieb - Yh wird direkt auf den Ausgang Y durchgeschaltet. |
Visualisierung
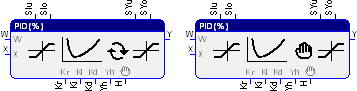
Der Baustein zeigt an, ob der Regler gerade im Automatik- oder Handbetrieb arbeitet.