PID Controller (Percent)
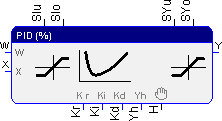
The function block PID-Controller (Percent) contains the following elements:
- proportional term
- integral term
- differential term
- integral wind-up avoidance logic
- setup of controller output; with auto/manual selection
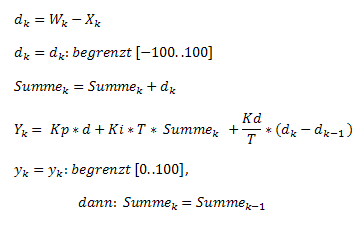
The controller can be tuned with the multipliers (Kr, Ki, Kd). The error input d (d=W-X) is set internally by the controller. It is limited within the range of -100 to 100. The controller output is limited within the range of 0 to 100.
Operations
Signals
| Name | I/O | Type(s) | Function |
|---|---|---|---|
| W | I | FLOAT | Set point |
| X | I | FLOAT | Controlled variable (sensor input) |
| Kr | I | FLOAT | Proportional gain input |
| Ki | I | FLOAT | Integral multiplier |
| Kd | I | FLOAT | Differential multiplier |
| Yh | I | FLOAT | Manual set input |
| H | I | BIT | Manual mode |
| Slu | o | BIT | Deviation limit reached -100 |
| Slo | O | BIT | Deviation limit reached 100 |
| SYu | O | BIT | Control limit reached (output is 0) |
| SYo | O | BIT | Control limit reached (output is 100) |
| Y | O | FLOAT | Controller output |
Parameters
| Ki | = 0 | I-term is off |
| Kd | = 0 | D-term is off |
| H | = 1 | Manual mode - Yh is channeled directly to Y |
Visualization
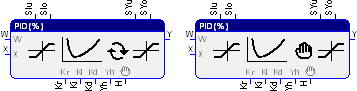
The symbol indicates, whether the controller runs in automatic or in manual mode.